In mathematics, the Poincaré inequality is a result in the theory of Sobolev spaces, named after the French mathematician Henri Poincaré. The inequality allows one to obtain bounds on a function using bounds on its derivatives and the geometry of its domain of definition. Such bounds are of great importance in the modern, direct methods of the calculus of variations. A very closely related result is the Friedrichs’ inequality.
This topic will cover two versions of the Poincaré inequality, one is for  spaces and the other is for
spaces and the other is for  spaces.
spaces.
The classical Poincaré inequality for spaces. Assume that  and that
and that  is a bounded open subset of the
is a bounded open subset of the  –dimensional Euclidean space
–dimensional Euclidean space  with a Lipschitz boundary (i.e., is an open, bounded Lipschitz domain). Then there exists a constant
with a Lipschitz boundary (i.e., is an open, bounded Lipschitz domain). Then there exists a constant  , depending only on and
, depending only on and  , such that for every function
, such that for every function  in the Sobolev space ,
in the Sobolev space ,
 ,
,
where

is the average value of over , with  standing for the Lebesgue measure of the domain .
standing for the Lebesgue measure of the domain .
Proof. We argue by contradiction. Were the stated estimate false, there would exist for each integer  a function
a function  satisfying
satisfying
 .
.
We renormalize by defining
 .
.
Then

and therefore
 .
.
In particular the functions  are bounded in .
are bounded in .
By mean of the Rellich-Kondrachov Theorem, there exists a subsequence  and a function
and a function  such that
such that
 in
in  .
.
Passing to a limit, one easily gets
 .
.
On the other hand, for each  and
and  ,
,
 .
.
Consequently,  with
with  a.e. Thus
a.e. Thus  is constant since is connected. Since
is constant since is connected. Since  then
then  . This contradicts to
. This contradicts to  .
.
The Poincaré inequality for  spaces. Assume that is a bounded open subset of the -dimensional Euclidean space with a Lipschitz boundary (i.e., is an open, bounded Lipschitz domain). Then there exists a constant , depending only on such that for every function in the Sobolev space ,
spaces. Assume that is a bounded open subset of the -dimensional Euclidean space with a Lipschitz boundary (i.e., is an open, bounded Lipschitz domain). Then there exists a constant , depending only on such that for every function in the Sobolev space ,
 .
.
Proof. Assume can be enclosed in a cube
 .
.
Then for any  , we have
, we have
 .
.
Thus
 .
.
Integration over  from
from  to
to  gives the result.
gives the result.
The Poincaré inequality for  spaces. Assume that
spaces. Assume that  and that is a bounded open subset of the -dimensional Euclidean space with a Lipschitz boundary (i.e., is an open, bounded Lipschitz domain). Then there exists a constant , depending only on and , such that for every function in the Sobolev space ,
and that is a bounded open subset of the -dimensional Euclidean space with a Lipschitz boundary (i.e., is an open, bounded Lipschitz domain). Then there exists a constant , depending only on and , such that for every function in the Sobolev space ,
 ,
,
where  is defined to be
is defined to be  .
.
Proof. The proof of this version is exactly the same to the proof of case.
Remark. The point  on the boundary of is important. Otherwise, the constant function will not satisfy the Poincaré inequality. In order to avoid this restriction, a weight has been added like the classical Poincaré inequality for case. Sometimes, the Poincaré inequality for spaces is called the Sobolev inequality.
on the boundary of is important. Otherwise, the constant function will not satisfy the Poincaré inequality. In order to avoid this restriction, a weight has been added like the classical Poincaré inequality for case. Sometimes, the Poincaré inequality for spaces is called the Sobolev inequality.

























 . Today, we consider another phenomena. Let assume
. Today, we consider another phenomena. Let assume  be an open set with smooth boundary and suppose
be an open set with smooth boundary and suppose  is a solution of
is a solution of

 . Assume that
. Assume that
 .
. .
.
 is constant. For any
is constant. For any  , by the Young inequality, it holds that
, by the Young inequality, it holds that .
. we obtain
we obtain
 .
. .
. .
. satisfies
satisfies
 .
. .
.
 ,
, .
. .
. .
.

 .
. . We will prove the following estimate
. We will prove the following estimate
 implies the existence of two positive constants
implies the existence of two positive constants  and
and  such that
such that
 .
. .
. is less than or equals to the area of
is less than or equals to the area of  . Therefore, we obtain
. Therefore, we obtain .
.

 .
. is bounded, continuous, and satisfies
is bounded, continuous, and satisfies .
.
 and
and  .
. .
. .
. in the second integral of the above inequality. Then we get immediately
in the second integral of the above inequality. Then we get immediately .
.
 .
.
 of
of  .
. .
. .
. , we can rewrite this one in terms of
, we can rewrite this one in terms of  . Actually, we have the following
. Actually, we have the following
 .
. and radius
and radius  by
by .
. .
. .
. .
. , then
, then  as well, where
as well, where  . In addition,
. In addition,  sends a set of small diameter not too close to
sends a set of small diameter not too close to 

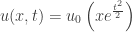
 . Unlike the heat equations in 1D, we cannot illustrate the solution
. Unlike the heat equations in 1D, we cannot illustrate the solution  . The way to solve this equation numerically is to use, for example, the
. The way to solve this equation numerically is to use, for example, the  the difference in time, if we have already known the solution
the difference in time, if we have already known the solution  , then we can solve
, then we can solve  . The Backward Euler Method applied to this model equation gives
. The Backward Euler Method applied to this model equation gives .
. , the solution
, the solution  which is actually
which is actually  . The time-discretization equation is then given by
. The time-discretization equation is then given by .
. is a
is a  the finite-dimensional subspace of
the finite-dimensional subspace of  with a basis
with a basis  such that for each
such that for each  , the restriction of
, the restriction of  into
into 
 for every vertices
for every vertices  at the
at the  -node are chosen so that
-node are chosen so that  and
and  for every
for every  .
.

 .
.
 .
. being
being  , we then have
, we then have .
. where
where
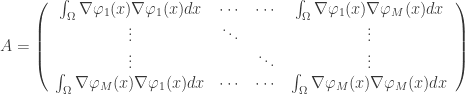
 .
.
 is the function sampled at quadrature point
is the function sampled at quadrature point  on the triangle, and
on the triangle, and  is the quadrature weight for that point. The quadrature operation results in a quantity that is normalized by the triangle’s area
is the quadrature weight for that point. The quadrature operation results in a quantity that is normalized by the triangle’s area  , hence the
, hence the  coefficient.
coefficient. ,
,  and
and  , any point
, any point  inside that triangle can be written in terms of the barycentric coordinates
inside that triangle can be written in terms of the barycentric coordinates  ,
,  and
and  as
as .
.
 is a constant and
is a constant and  has some special form. The advantage of the method is that it does not require any integrations and is therefore quick to use. The homogeneous equation
has some special form. The advantage of the method is that it does not require any integrations and is therefore quick to use. The homogeneous equation
 .
. ,
, . If
. If  .
. .
. in a similar form
in a similar form .
. .
. .
. .
. ,
, .
. is a polynomial of degree
is a polynomial of degree  is a polynomial of degree
is a polynomial of degree  . If
. If  .
. , so we look for a solution in the same form
, so we look for a solution in the same form  . This leads to
. This leads to  , and
, and .
. .
. ,
,  ,
,  . So a particular solution is
. So a particular solution is .
. .
. , since it would involve a division by zero. More generally, if the equation reads
, since it would involve a division by zero. More generally, if the equation reads , with
, with  an nth degree polynomial, then we can find a particular solution
an nth degree polynomial, then we can find a particular solution ,
, is some other nth degree polynomial as long as
is some other nth degree polynomial as long as  . If, on the other hand,
. If, on the other hand,  .
.

 is a given continuous function. The left side of the PDE is a total derivative along the curves in the
is a given continuous function. The left side of the PDE is a total derivative along the curves in the  plane defined by the differential equation
plane defined by the differential equation .
.
 on
on  gives the speed of these characteristic curves, which varies in spacetime.
gives the speed of these characteristic curves, which varies in spacetime.



 .
. .
. . We have the following pictures.
. We have the following pictures.
 This picture shows the shape of solution in the spacetime.
This picture shows the shape of solution in the spacetime.