MA1506 Mathematics II Tutorials
Tutorial 1: First order differential equations
The aim of this tutorial was to introduce some elements of differential equations such as definition, types of equations, related physical problems, etc. The slides used in the class can be downloaded from here ![]() .
.
As the main objective of this tutorial is about ODEs, I would like to mention some basic idea of ODEs. Let take an example from the lecture notes.
Example. Solve 
It is not hard to see that this ODE is of separable form and one can easily solve it using integration. After several steps, one gets that the general solution of the above ODE is

As noticed in the lecture notes, this ODE basically has infinitely many solution as you can see from the above formula, the presence of some constant 


To support my explanation, I have used Maple to plot the following picture (called phase portrait)

If you are interested in Maple, you can read this, and the code that I have used is
with(DEtools): NLC := diff(y(x),x) = (1+y(x)^2)*exp(x); ivs := [y(0)=-10,y(0)=0,y(0)=10]; DEplot(NLC, y(x), x=-10..10, ivs, arrows=medium, linecolor=magenta, color=blue);
As you can see, I have used three initial values: 





Q1. This question is standard since they are of separable form. In order to solve it, you use integration. However, there was one thing that I left during the class concerning part (d). In order to prove the statement saying that either 


 Three pink curves correspond to three initial values
Three pink curves correspond to three initial values 

We now prove by contradiction. Without loss of generality, we may assume that 







By going back to the ODE, there holds

where the constant

By taking 
Q2. The only thing in this question is that why do we need a negative sign in the following ODE
where 





which immediately implies that 
Q3. Same as in the previous question, we still need a negative sign in either

or

since 

Q4. I think the slides and the answer paper are clear enough. The only thing that you probably worry is that eventually you arrive at

which is not well-defined at 

Q5. This is a standard question, I omit it. Notice that in part (b), we can use 
Tutorial 2: First order differential equations (cont’)
The aim of this tutorial was to consider the first order differential equations of general form. The slides used in the class can be downloaded from here ![]() .
.
Q1. This question is standard and I don’t want to spend much time on this. However, it seems that some of you may have trouble with the following integrals

where 


For the sake of simplicity, we only need to consider these integrals with 

As you can see, we have just raised 



For the second integral, we do the same trick. However, since the term 


Q2. As I have already mentioned during the class, this question typically considers the integral form of ODEs which can easily deduce to the original form by differentiating. Within this question, we have already touched a second order ODE which basically needs two conditions in order to find a particular solution. We shall consider these ODEs in the next tutorial.
Keep in mind that for a second order ODE, the general solution mainly depends on two parameters. As such, in order to find those parameters, we need two conditions, one involves 

Q3, Q4, Q5. Please follow the slides used during the class.
If you are interested in MATLAB, we may heard a program called MuPAD. In fact, I have used MuPAD to plot all diagrams shown in the slides. Here is a sample that I have used to create a diagram in Q3.
f1:= plot::Function2d(2-2*exp(-1/3*x), LegendText = "2-2*exp(-1/3*x)", x = -10/10 .. 57/10, Color = RGB::Blue): f2:= plot::Function2d(2-2*exp(1/3*x), LegendText = "2-2*exp(1/3*x)", x = -10/10 .. 57/10, Color = RGB::Red): plot(f1, f2, LegendVisible = TRUE, Scaling = Constrained)
In this blog, we have talked about MuPAD several times, you can find these posts here.
Tutorial 3: Second order differential equations
The aim of this tutorial was to consider the second order differential equations of general form. The slides used in the class can be downloaded from here ![]() .
.
Q4. I think I should mention two things concerning to this question: the sign of 

As you can see from the slides, it is necessary to find the precise sign for Physically, due to gravity (since we have the presence of massive body, like the Sun), the earth has the so-called gravitational potential energy. Once the Earth falls to the Sun, such potential energy starts decreasing. According to the conservation law of energy, the lost potential energy will transform to the kinetic energy. That kinetic energy will speed up the Earth. In other words, the speed of falling will increase from time to time. Since the distance function 
And since the speed of falling is increasing, it is obvious to see that the function As such, we have to choose the negative sign for 
Concerning to the formula for
The point is that what does this formula mean? In fact, the above formula gives us a relation between time 



are moments that the body meets 

Let us go back to our problem. If we denote by 

we then immediately see that the time travel is

But thanks to the fundamental theorem of calculus, there holds

And this is what we need. Notice that we have used the following

Q1, Q3: I think we don’t have any trouble with these two questions.
Q2: I have used a slightly different approach for finding a particular solution using the method of undetermined coefficients.
Tutorial 4: The harmonic oscillator
The aim of this tutorial was to consider the harmonic oscillator. The slides used in the class can be downloaded from here ![]() . I want to emphasize something about the stability of equilibrium points for ODEs. At first, any second order ODEs
. I want to emphasize something about the stability of equilibrium points for ODEs. At first, any second order ODEs 

In this way, it suffices to study the stability of equilibrium points for the following system
where 



As we have discussed in the class, in order to study the stability of equilibrium points, it is important to consider its linearized system, that is,

In terms of vectors, the above system is usually written as

where 

Hyperbolic equilibrium point.
An equilibrium point

have zero real part.
Sink equilibrium point. This is the case when all of the eigenvalues of the matrix have negative real part.
Source equilibrium point. This is the case when all of the eigenvalues of the matrix have positive real part.
Saddle equilibrium point. This is the case when the matrix has at least one eigenvalue with a positive real part and at least one with a negative real part.
Example. Let us classify all of the equilibrium points of the nonlinear system

We obviously have two equilibrium points 


Thus, 

 Obviously, for the transformed system for
Obviously, for the transformed system for

Therefore, if 
Non-hyperbolic equilibrium point.
The stability of nonhyperbolic equilibrium points is typically more difficult to determine. A method, due to Liapunov, that is very useful for deciding the stability of nonhyperbolic equilibrium points is presented here.
A Lyapunov candidate function. A continuous scalar function

Once we have the function

For example, with 

Stable equilibrium. If the time derivative of the Lyapunov-candidate-function is locally negative semidefinite in a neighborhood 

then
Locally asymptotically stable equilibrium. If the time derivative of the Lyapunov-candidate-function is locally negative definite in a neighborhood

then
Globally asymptotically stable equilibrium. If the time derivative of the Lyapunov-candidate-function is globally negative definite in a neighborhood of

then
Unstable equilibrium. If the time derivative of the Lyapunov-candidate-function is locally positive definite in a neighborhood

then
Notice that the difference between asymptotically stability and stability is that for the latter case, the solution stays in a neighborhood of the equilibrium point while in the former case, it is required that the solution needs to converge to the equilibrium point.
Example. Let us go back to the ODE 


is well-known. For example, if 

Obviously, 
Example. For the system

the following is the phase portrait

Tutorial 5: The Malthusian and logistic growth models
The aim of this tutorial was to consider the Malthusian and logistic growth models. The slides used in the class can be downloaded from here ![]() .
.
There is one thing that I should mention here is the No-Crossing Principle. In fact, we have already used once in Tutorial 1 when we deal with the following ODE

As you may see,
Tutorial 6: The Malthusian and logistic growth models (cont’)
The aim of this tutorial was to continue to consider some growth models such as the harvesting model, the logistic model, etc. The slides used in the class can be downloaded from here ![]() .
.
In Q1, to help you understand better, when 

with 



As you may see, this function will decrease very fast.
In Q5, when we talk about the number of molecules of 


In the literature, the volume of that piece is nothing but

In other words, if you know the area of its cross-section, you simply integrate to get the volume. As such, the term 

and after dividing by 

Thanks to the L’Hopital rule, this is easy as shown below

Another important stuff lying in this tutorial is about understanding phase portraits. As I have mentioned in the class when we was talking about Q5, it is important to find equilibrium points, to identity whether they are stable or unstable, to find the behavior of the population, etc.
Tutorial 7: The Laplace transformation
The aim of this tutorial was to introduce basic notations about the Laplace transformation. The slides used in the class can be downloaded from here ![]() . I only want to emphasize that in Q5, since the force is exerted suddenly, this suggests that we need a Dirac delta function. Therefore, the force will be proportional to
. I only want to emphasize that in Q5, since the force is exerted suddenly, this suggests that we need a Dirac delta function. Therefore, the force will be proportional to 

Although the coefficient function 


one can see that 

By taking the Laplace transform of both sides we get that
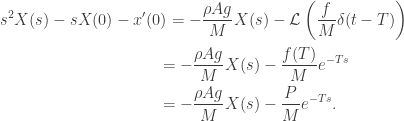
Thus, as one can see, 


In Q6, suppose that we don’t want to assume that the wave hits instantaneously: we want to model the situation by assuming that the momentum 


Notice that although we don’t know anything about ![t \in [T, T+\tau]](https://s0.wp.com/latex.php?latex=t+%5Cin+%5BT%2C+T%2B%5Ctau%5D&bg=ffffff&fg=333333&s=0&c=20201002)

one easily gets that 

To take the Laplace transform of both sides, we only need to consider the extra part, 

Again, as you can see from the previous argument, the values for 

![[T,T+\tau]](https://s0.wp.com/latex.php?latex=%5BT%2CT%2B%5Ctau%5D&bg=ffffff&fg=333333&s=0&c=20201002)

Tutorial 8: The theory of matrices
The aim of this tutorial was to introduce basic notations about linear transformation, matrices, rotation and shearing. The slides used in the class can be downloaded from here ![]() . I would like to highlight that throughout the tutorial, we have touched several matrix decomposition. I would take this chance to introduce more decompositions. For those who are interested in, please click this.
. I would like to highlight that throughout the tutorial, we have touched several matrix decomposition. I would take this chance to introduce more decompositions. For those who are interested in, please click this.
As you can see, we have use the Jordan normal decomposition in the last question. We shall come back to this in the next tutorial when we deal with the role of the eigenvalue 1 in the Markov processes.
Tutorial 9: The theory of matrices (cont’)
The aim of this tutorial was to introduce basic notations about Markov chains, eigenvalues and eigenvectors. The slides used in the class can be downloaded from here ![]() . I just want to emphasize that if
. I just want to emphasize that if 

Indeed, suppose 
We shall prove by induction. Assuming 
and

In order to prove that

for each fixed 


we find that

We now switch the double sum appeared in the preceding identity, we get
Thus by induction, the matrix
Tutorial 10: Systems of first order ODEs
The aim of this tutorial was to introduce some notion about systems of first order ODEs. The slides used in the class can be downloaded from here ![]() . A typical example is the following
. A typical example is the following

for 



I just realized that there is no typical approach for solving the above system in the lecture notes. I propose here an approach in the case the coefficient matrix has two distinct eigenvalues, say 

By the Jordan decomposition, if we denote 


Using this and multiply both sides of the system by 

Therefore, if we think that

is a new variable, we then get the following decouped system for 

Since the preceding system is decoupled, we can solve

A careful analysis shows that the solution 

In the general case, the following is the so-called fundamental fact for the initial value problem
Let
, the initial value problem
has a unique solution for all
which is given by


Now we turn to the case when 


or
Respectively, we may have one of the followin: either


or

We now list the various phase portraits that result from thesesolutions, grouped according to their topological type with a finer classificationof sources and sinks into various types of unstable and stable nodesand foci:
Case 1. Suppose that
with 
In this case, we have a saddle at the origin. The only difference between 
Case 2. Suppose that either
with 
with 
In this case, we have stable node at the origin.
Case 3. Suppose that
with 
In this case, we have a stable focus at the origin, i.e., a spiral sink.
Case 4. Suppose that

In this case, we only have a center at the origin.
If you have time, please read this note. Now it’s time to enjoy some music. Following is my favorite song, Les Rois Du Monde (king of the world), please enjoy
Tutorial 11: Partial Differential Equations
The aim of this tutorial was to introduce the notion of partial differential equations. The method used is separation of variables. The slides used in the class can be downloaded from here ![]() .
.

บอลเต็งวันนี้
MA1506 – AY11-12 | Ngô Quốc Anh
Trackback by บอลเต็งวันนี้ — December 13, 2022 @ 21:40